 |
WarpTwin
Documentation for WarpTwin models and classes.
|
|
WarpTwin
Documentation for WarpTwin models and classes.
|
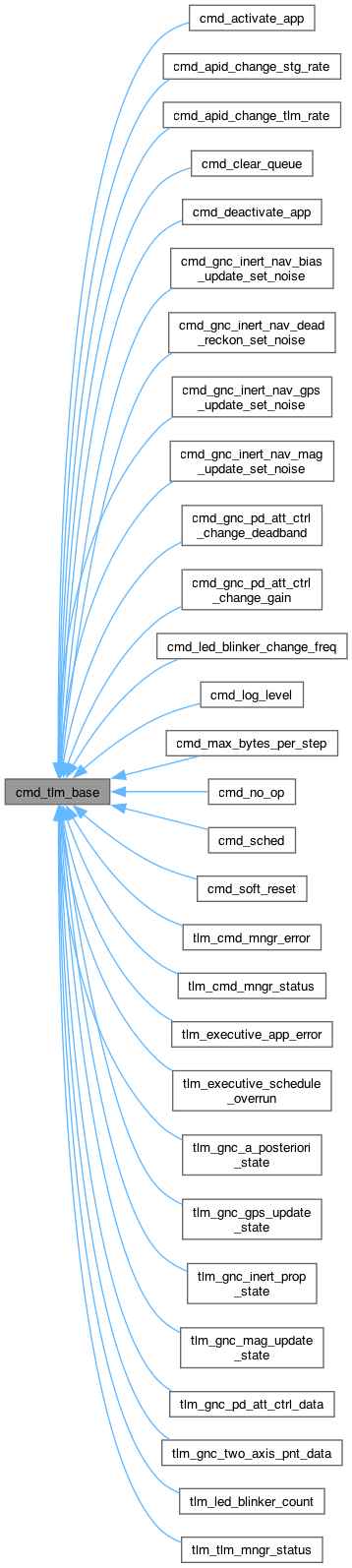
Base struct in definition of command and telemetry packets. More...
#include <Telemetry.h>
Public Member Functions | |
| virtual uint16 | apid () const |
| virtual uint16 | size () const |
| virtual void | packetize (uint8 *out) const |
| virtual void | depacketize (const uint8 *out) |
| virtual int16 | str (char *output, uint16 size) const |
Base struct in definition of command and telemetry packets.
cmd_tlm_base should never be used directly, and instead defines virtual functions which are used to evaluate and manipulate command and telemetry packets.
|
inlinevirtual |
Reimplemented in cmd_activate_app, cmd_apid_change_stg_rate, cmd_apid_change_tlm_rate, cmd_clear_queue, cmd_deactivate_app, cmd_gnc_inert_nav_bias_update_set_noise, cmd_gnc_inert_nav_dead_reckon_set_noise, cmd_gnc_inert_nav_gps_update_set_noise, cmd_gnc_inert_nav_mag_update_set_noise, cmd_gnc_pd_att_ctrl_change_deadband, cmd_gnc_pd_att_ctrl_change_gain, cmd_led_blinker_change_freq, cmd_log_level, cmd_max_bytes_per_step, cmd_no_op, cmd_sched, cmd_soft_reset, tlm_cmd_mngr_error, tlm_cmd_mngr_status, tlm_executive_app_error, tlm_executive_schedule_overrun, tlm_gnc_a_posteriori_state, tlm_gnc_gps_update_state, tlm_gnc_inert_prop_state, tlm_gnc_mag_update_state, tlm_gnc_pd_att_ctrl_data, tlm_gnc_two_axis_pnt_data, tlm_led_blinker_count, and tlm_tlm_mngr_status.
|
inlinevirtual |
Reimplemented in cmd_activate_app, cmd_apid_change_stg_rate, cmd_apid_change_tlm_rate, cmd_clear_queue, cmd_deactivate_app, cmd_gnc_inert_nav_bias_update_set_noise, cmd_gnc_inert_nav_dead_reckon_set_noise, cmd_gnc_inert_nav_gps_update_set_noise, cmd_gnc_inert_nav_mag_update_set_noise, cmd_gnc_pd_att_ctrl_change_deadband, cmd_gnc_pd_att_ctrl_change_gain, cmd_led_blinker_change_freq, cmd_log_level, cmd_max_bytes_per_step, cmd_no_op, cmd_sched, cmd_soft_reset, tlm_cmd_mngr_error, tlm_cmd_mngr_status, tlm_executive_app_error, tlm_executive_schedule_overrun, tlm_gnc_a_posteriori_state, tlm_gnc_gps_update_state, tlm_gnc_inert_prop_state, tlm_gnc_mag_update_state, tlm_gnc_pd_att_ctrl_data, tlm_gnc_two_axis_pnt_data, tlm_led_blinker_count, and tlm_tlm_mngr_status.
|
inlinevirtual |
Reimplemented in cmd_activate_app, cmd_apid_change_stg_rate, cmd_apid_change_tlm_rate, cmd_clear_queue, cmd_deactivate_app, cmd_gnc_inert_nav_bias_update_set_noise, cmd_gnc_inert_nav_dead_reckon_set_noise, cmd_gnc_inert_nav_gps_update_set_noise, cmd_gnc_inert_nav_mag_update_set_noise, cmd_gnc_pd_att_ctrl_change_deadband, cmd_gnc_pd_att_ctrl_change_gain, cmd_led_blinker_change_freq, cmd_log_level, cmd_max_bytes_per_step, cmd_no_op, cmd_sched, cmd_soft_reset, tlm_cmd_mngr_error, tlm_cmd_mngr_status, tlm_executive_app_error, tlm_executive_schedule_overrun, tlm_gnc_a_posteriori_state, tlm_gnc_gps_update_state, tlm_gnc_inert_prop_state, tlm_gnc_mag_update_state, tlm_gnc_pd_att_ctrl_data, tlm_gnc_two_axis_pnt_data, tlm_led_blinker_count, and tlm_tlm_mngr_status.
|
inlinevirtual |
Reimplemented in cmd_activate_app, cmd_apid_change_stg_rate, cmd_apid_change_tlm_rate, cmd_clear_queue, cmd_deactivate_app, cmd_gnc_inert_nav_bias_update_set_noise, cmd_gnc_inert_nav_dead_reckon_set_noise, cmd_gnc_inert_nav_gps_update_set_noise, cmd_gnc_inert_nav_mag_update_set_noise, cmd_gnc_pd_att_ctrl_change_deadband, cmd_gnc_pd_att_ctrl_change_gain, cmd_led_blinker_change_freq, cmd_log_level, cmd_max_bytes_per_step, cmd_no_op, cmd_sched, cmd_soft_reset, tlm_cmd_mngr_error, tlm_cmd_mngr_status, tlm_executive_app_error, tlm_executive_schedule_overrun, tlm_gnc_a_posteriori_state, tlm_gnc_gps_update_state, tlm_gnc_inert_prop_state, tlm_gnc_mag_update_state, tlm_gnc_pd_att_ctrl_data, tlm_gnc_two_axis_pnt_data, tlm_led_blinker_count, and tlm_tlm_mngr_status.
|
inlinevirtual |
Reimplemented in cmd_activate_app, cmd_apid_change_stg_rate, cmd_apid_change_tlm_rate, cmd_clear_queue, cmd_deactivate_app, cmd_gnc_inert_nav_bias_update_set_noise, cmd_gnc_inert_nav_dead_reckon_set_noise, cmd_gnc_inert_nav_gps_update_set_noise, cmd_gnc_inert_nav_mag_update_set_noise, cmd_gnc_pd_att_ctrl_change_deadband, cmd_gnc_pd_att_ctrl_change_gain, cmd_led_blinker_change_freq, cmd_log_level, cmd_max_bytes_per_step, cmd_no_op, cmd_sched, cmd_soft_reset, tlm_cmd_mngr_error, tlm_cmd_mngr_status, tlm_executive_app_error, tlm_executive_schedule_overrun, tlm_gnc_a_posteriori_state, tlm_gnc_gps_update_state, tlm_gnc_inert_prop_state, tlm_gnc_mag_update_state, tlm_gnc_pd_att_ctrl_data, tlm_gnc_two_axis_pnt_data, tlm_led_blinker_count, and tlm_tlm_mngr_status.